Product Description
Available height:5-80m
Electric pressure:10kv--550kv
Material:Q345B/A572,minimum yield strength>=345MPA,
Galvanized:Hot dip galvanization,thickness is>=12um
Delivery lead time:30 days after receiving 30% deposit
Lifetime:Minimum 25 years
Structure:Overlap connection/Flange connection
Galvanizing standard:EN ISO 146,ASTM/A123
Manufacturing and workmanship:BS449 or AISC
Welding standard:BSEN287,BSEN288 or equivalent
Telecommunication Monopole,Palm Tree Monopole,Supply Power Transmission Monopole,60FT Monopole JIANGSU XINJINLEI STEEL INDUSTRY CO.,LTD , https://www.chinasteelpole.com
60FT Monopole Tower
Q235B/A36,minimum yield strength>=235MPA
Agv car design internal structure diagram, agv car working principle _ positioning method _ features and guidance
**How AGV Cars Work**
The guidance system of an AGV (Automated Guided Vehicle) involves calculating the actual control commands for the vehicle based on position data from its sensors. This means setting the desired speed and steering angle, which is essential for AGV control. In short, AGV guidance is all about tracking a specific path. There are several ways to guide an AGV, such as using the center point of the sensor as a reference and following a virtual point on a magnetic strip. The main goal is to adjust the rotational speed of the wheels to change direction, ensuring that the reference point aligns with the virtual one, allowing the AGV to follow the path accurately.
Once an AGV receives a material handling command, the control system calculates the best route based on the stored map and the current location and direction of the vehicle. It then automatically controls the movement and steering of the AGV. When it reaches the loading area and parks precisely, the transfer mechanism engages to load the goods. The AGV then moves to the unloading point, parks again, and unloads the cargo. After that, it reports its status and location back to the control system before heading to a standby area until the next task is assigned.

**Features of AGV Cars**
1. **High Automation**: AGVs are controlled by computers, electronic systems, magnetic sensors, and laser reflectors. When materials are needed in a workshop, staff input the request into a terminal, which sends the information to the central control room. Technicians then issue instructions, and the AGV executes them automatically.
2. **Automatic Charging**: When the battery is low, the AGV sends a charge request to the system. Once approved, it queues up for charging. These vehicles have long-lasting batteries, lasting over two years, and can operate for about 4 hours after just 15 minutes of charging.
3. **Aesthetic Design**: AGVs improve the overall appearance of a facility, enhancing the company's image.
4. **Space Efficiency**: AGVs can move freely between different areas of a factory, reducing the need for large storage spaces.
**Structure of an AGV Trolley**
1. **Chassis**: The physical body of the AGV, serving as the base for all other components.
2. **Power Unit**: Typically powered by 24V or 48V DC batteries, often lead-acid or lithium-ion. Lithium batteries allow for 24-hour operation.
3. **Drive System**: Includes wheels, gearboxes, brakes, motors, and speed controllers, which regulate speed, direction, and braking.
4. **Guidance System**: Uses magnetic sensors and landmark sensors to navigate, enabling forward, backward, branching, and turning.
5. **Controller**: Receives commands from the control center and provides real-time feedback on the vehicle’s status.
6. **Communication Device**: Enables communication between the AGV and the ground control station.
7. **Safety Devices**: Includes obstacle sensors, anti-collision mechanisms, and emergency stop switches for protection.
8. **Load Carrier**: A traction bar used to carry the transported goods.
9. **Information Processing System**: Monitors the AGV’s status and communicates with the control station in real time.

**AGV Guidance Methods**
AGV guidance refers to how the vehicle determines its direction and path. Common methods fall into two categories: pre-defined path and free-path navigation.
**(1) Predefined Path Guidance**
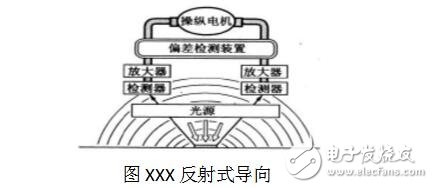
This method uses physical markers or signals along the route. Examples include:
- **Reflective Tape or Magnetic Guidance**: A reflective or magnetic tape is laid on the floor, and sensors on the AGV detect it to adjust direction.
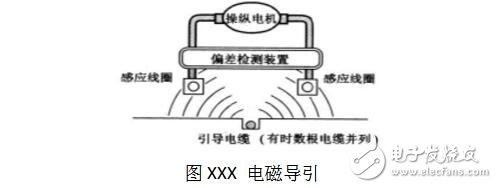
- **Electromagnetic Induction**: Cables are buried underground, and the AGV detects the magnetic field to stay on course.
**(2) Free-Path Guidance**
This method allows the AGV to navigate without fixed paths. For example:
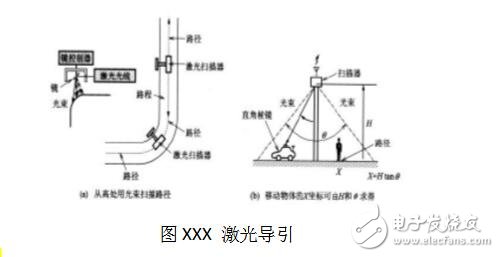
- **Laser Guidance**: An AGV equipped with a rotating laser scanner identifies reflective targets on walls or pillars to determine its position and adjust its path accordingly.
Other methods include visual guidance, where the AGV uses cameras to recognize signs or markers, and inertial guidance using gyroscopes and accelerometers.
**AGV Positioning Methods**
To ensure accurate positioning, various sensors are used:
- **Photoelectric Sensors**: Use light detection to determine position, but offer lower accuracy.
- **Eddy Current Sensors**: Provide high precision but require larger space.
- **Combined Sensor Systems**: Use both photoelectric and magnetic sensors for improved accuracy and reliability.
**Recommended Reading**
- [How Does the AGV Car Work?](#)
- [Development Status and Application Fields of AGV Cars](#)
- [How to Achieve Positioning of AGV Car](#)
- [Features and Comparative Analysis of RGV and AGV Trolleys](#)